PODCAST · technology
Introduction to Robotics
by Google NotebookLLM
Introduction to Robotics
-
1
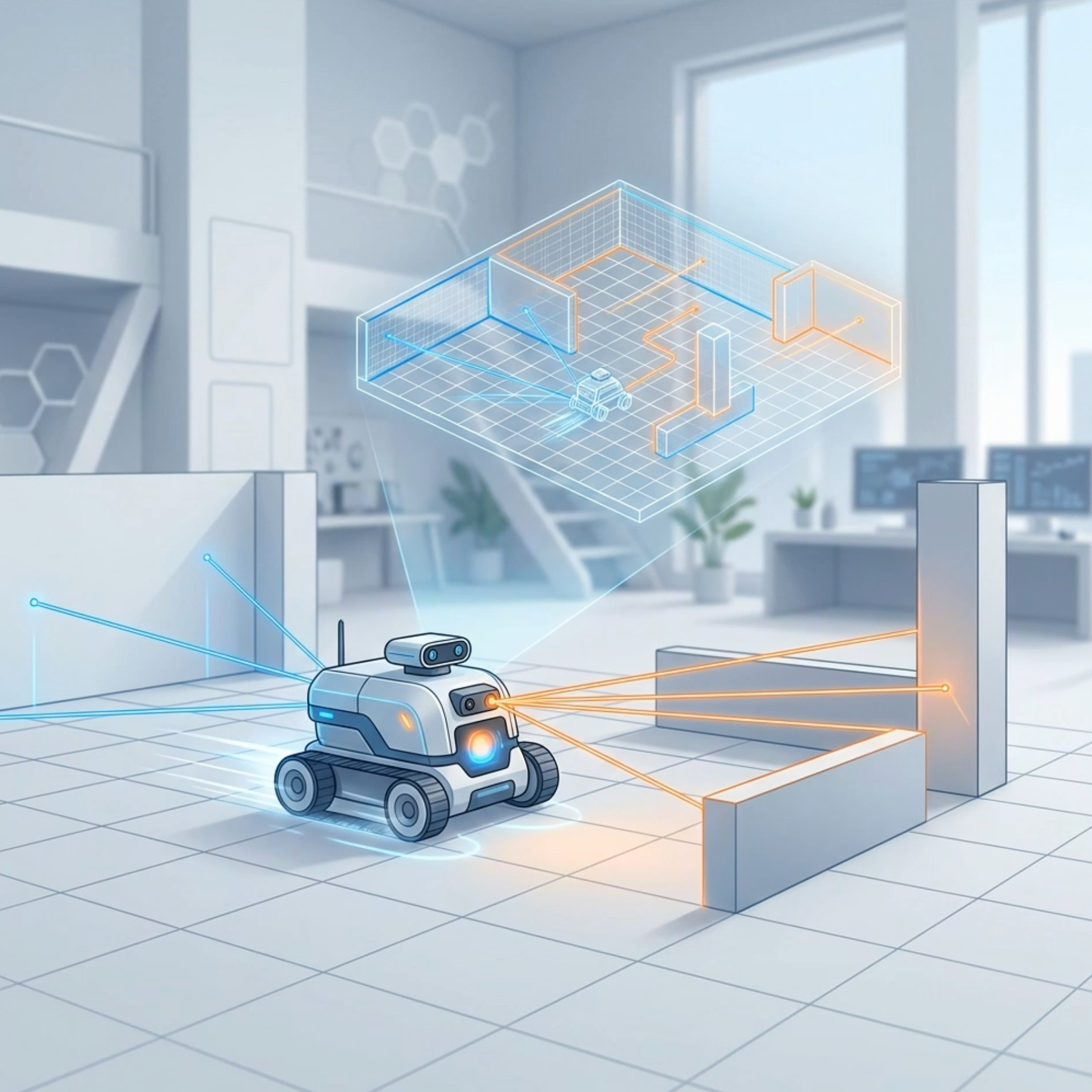
SLAM Explained: The Core of Robotic Autonomy & The "Chicken and Egg" Problem
Ever wonder how a robot navigates an unfamiliar environment, like a dark forest, without getting lost? In this video, we break down Simultaneous Localization and Mapping (SLAM), one of the most fundamental capabilities required for true robotic autonomy.We explore the classic "chicken and egg" problem of robotics: how a robot needs a map to know its location, but needs to know its location to build that map.In this video, we cover:The 5 Core Components of SLAM: From sensor data processing and odometry to mapping, data association, and the magic of loop closure (which corrects accumulated drift to keep the map consistent).Classical vs. Modern SLAM: We trace the evolution of SLAM from early probabilistic filters like EKF-SLAM and FastSLAM (using particle filters) to the modern revolution of Graph-SLAM, which treats navigation as a full optimization problem.Practical ROS 2 Implementations: See how these concepts apply in the real world using tools like SLAM Toolbox for 2D Lidar mapping and RTAB-Map for 3D visual SLAM with depth cameras.Whether you are building self-driving cars, autonomous drones, or your very first ROS 2 rover, understanding the blend of geometry, probability theory, and optimization behind SLAM is where it all begins
We're indexing this podcast's transcripts for the first time — this can take a minute or two. We'll show results as soon as they're ready.
No matches for "" in this podcast's transcripts.
No topics indexed yet for this podcast.
Loading reviews...
Loading similar podcasts...
URL copied to clipboard!