PODCAST · science
Unidad 5: Introducción a los sistemas de control
by Sistemas Dinámicos y Control
Quinta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
39
5.13.4 Obtención del margen de ganancia y de fase con Matlab
Comandos u ordenes utilizados en el software Matlab para obtener los margenes de ganancia y de fase para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
38
5.13.3 Estabilidad relativa
Concepto de estabilidad relativa para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
37
5.13.2 Margen de fase
Margen de fase presente en el análisis en el domino frecuencial para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
36
5.13.1 Margen de ganancia
Margen de ganancia presente en el análisis en el domino frecuencial para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
35
5.13 Margenes de estabilidad
Criterios para imponer ciertos margenes de estabilidad para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
34
5.12 Criterio de estabilidad de Nyquist
Criterio de estabilidad de Nyquist para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
33
5.11 Criterio de estabilidad de Bode
Criterio de estabilidad de Bode para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
32
5.10.3 Representación gráfica de los lugares de las raíces con Matlab
Comandos de Matlab para construir el lugar geométrico de las raíces (LGR) para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
31
5.10.2 Reglas para construir el lugar geométrico de las raíces
Reglas o pasos necesarios para construir el lugar geométrico de las raíces (LGR) para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
30
5.10.1 Condiciones de ángulo y magnitud
Condiciones de ángulo y magnitud presentes al aplicar el criterio de estabilidad de Evans o del lugar geométrico de las raíces para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
29
5.10 Estabilidad por el lugar de raíces
Criterio de estabilidad de Evans o del lugar geométrico de las raíces para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
28
5.9.2 Aplicación del criterio de Routh
Forma o método de aplicación del criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
27
5.9.1 Casos especiales
casos especiales que se presentan al aplicar el criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
26
Procedimiento criterio de Routh
Pasos para implementar el criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
25
5.9 Criterio de estabilidad de Routh
Criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
24
5.8 Estabilidad de sistemas de control en lazo cerrado
Criterio general de estabilidad para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
23
Resumen error en estado estacionario
Resumen sobre las tres constante (Kp, Kv, Ka) de error en estado estacionario presentes en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
22
5.7.3 Constante de error de aceleración estática Ka
Calculo y descripción de la constante de error de aceleración estática ante una entrada parábola paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
21
5.7.2 Constante de error de velocidad estática Kv
Calculo y descripción de la constante de error de velocidad estática ante una entrada rampa paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
20
5.7.1 Constante de error de posición estática Kp
Calculo y descripción de la constante de error de posición estática ante una entrada escalón paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
19
5.7 Errores de estado estacionario
Calculo y descripción de los errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
18
5.5 Diagrama de bloques
Representación de sistemas de control de procesos mediante los diagramas de bloques, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
17
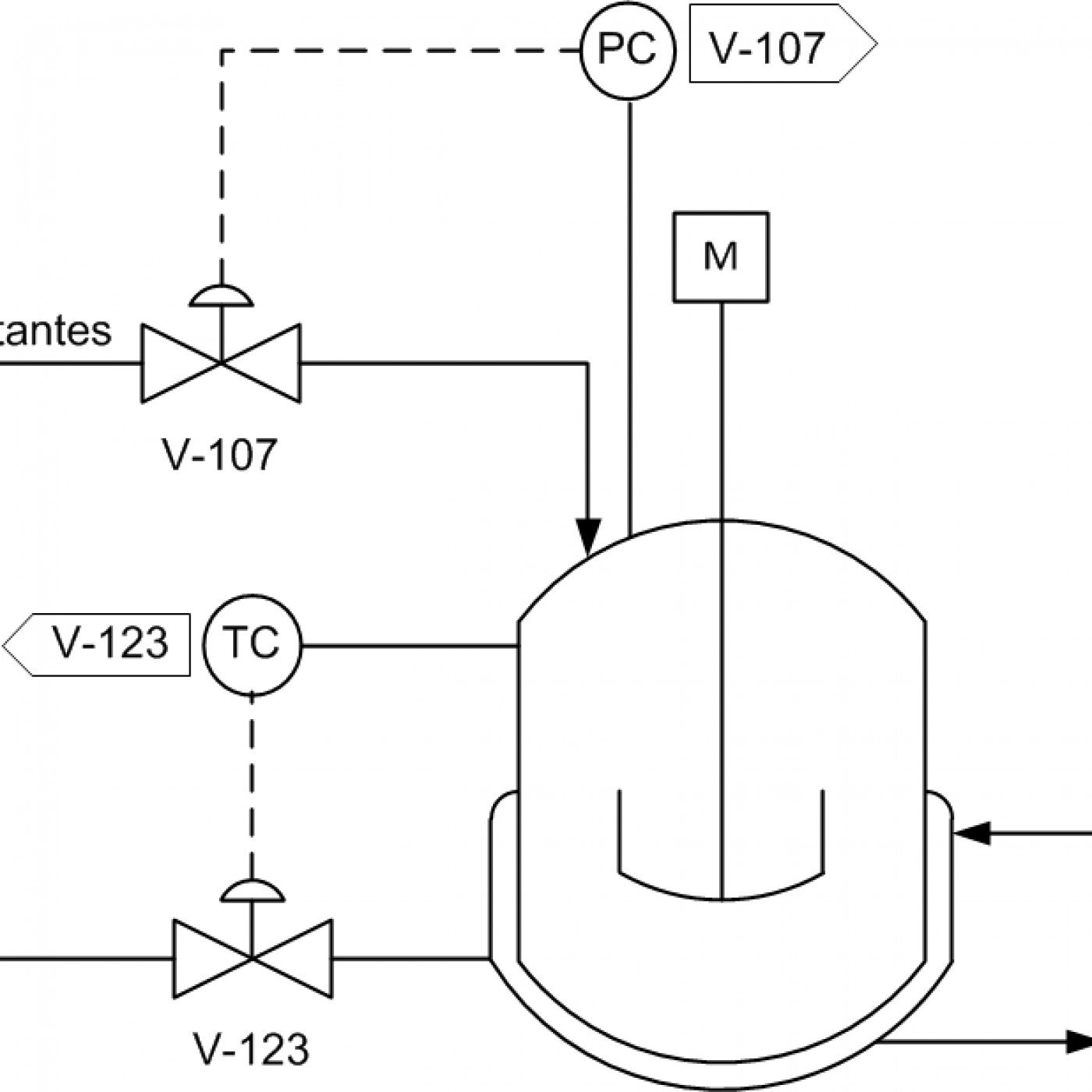
5.4.1 Elaboración de un P&ID
Representación de sistemas de control de procesos mediante P&ID ejemplo de elaboración de un diagrama de tuberías e instrumentación, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
16
f) Miscelánea de símbolos
Representación de sistemas de control de procesos mediante P&ID Miscelánea de símbolos, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
15
e) Símbolos de transmisores
Representación de sistemas de control de procesos mediante P&ID símbolos de transmisores, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
14
d) Identificación con letras
Representación de sistemas de control de procesos mediante P&ID identificación con letras, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
13
c) Instrumentación general o símbolos de funciones
Representación de sistemas de control de procesos mediante P&ID símbolos de instrumentos o funciones, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
12
b) Símbolos de válvulas
Representación de sistemas de control de procesos mediante P&ID símbolos de válvulas, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
11
a) Símbolos de líneas
Representación de sistemas de control de procesos mediante P&ID símbolos de tuberías, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
10
5.4 Diagramas de instrumentación P&ID
Representación de sistemas de control de procesos mediante los diagramas de tuberías e intrumentación, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
9
5.1.2 Función de transferencia en lazo cerrado
Descripción de las funciones de transferencia en lazo cerrado para sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
8
5.1.1 Función de transferencia en lazo abierto y de trayectoria directa
Descripción de las funciones de transferencia en lazo abierto y en la trayectoria directa para sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
7
5.1 Tipos de sistemas de control
Definición de las clases o tipos de sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
6
5.3 Configuración del controlador
Distintas configuraciones que pueden presentarse o seleccionarse cuando se diseñan sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
5
5.2 Especificaciones de diseño
Especificaciones a tener en cuenta para iniciar con el diseño de sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
4
5.6 Metodología de diseño para un control de procesos
Metodología propuesta para iniciar con el diseño de sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
3
Terminología de los sistemas de control
Principales términos utilizados en el análisis y diseño de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
2
Objetivos de los sistemas de control
Objetivos principales de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
1
5. Introducción a los sistemas de control
Introducción para la Unidad 5: Introducción a los sistemas de control, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
No matches for "" in this podcast's transcripts.
No topics indexed yet for this podcast.
Loading reviews...
ABOUT THIS SHOW
Quinta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
HOSTED BY
Sistemas Dinámicos y Control
CATEGORIES
Loading similar podcasts...
URL copied to clipboard!