EPISODE · Sep 25, 2025 · 31 MIN
Kalman Filter und Sensor Fusion (realraum)
from Chaos Computer Club - recent events feed (high quality) · host Christian Hartler
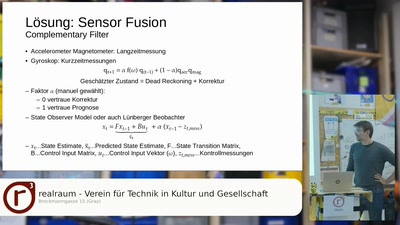
Ein kurzer Vortrag, der die Vor- und Nachteile einzelner Sensoren aufzeigt, was die Entwicklung der Sensor Fusion motivierte. Es wird ein Überblick geschaffen, wie man vom einfachen Complementary Filter zum Kalman Filter kommt und wie man diesen adaptiert um nichtlineare Zustände zu berechnen. Diese Erweiterung ist als Extended Kalman Filter bekannt, die in den meisten Anwendung der Navigation und Orientierungsbestimmungen von Flugzeugen zum Einsatz kommt. https://creativecommons.org/licenses/by-sa/4.0/ about this event: https://c3voc.de
Embed this episode
NOW PLAYING
Kalman Filter und Sensor Fusion (realraum)
No transcript for this episode yet
Similar Episodes
No similar episodes found.
Similar Podcasts
No similar podcasts found.