PODCAST · science
Unidad 5: Introducción a los sistemas de control
by Sistemas Dinámicos y Control
Quinta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
39
5.13.4 Obtención del margen de ganancia y de fase con Matlab
Comandos u ordenes utilizados en el software Matlab para obtener los margenes de ganancia y de fase para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
38
5.13.3 Estabilidad relativa
Concepto de estabilidad relativa para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
37
5.13.2 Margen de fase
Margen de fase presente en el análisis en el domino frecuencial para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
36
5.13.1 Margen de ganancia
Margen de ganancia presente en el análisis en el domino frecuencial para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
35
5.13 Margenes de estabilidad
Criterios para imponer ciertos margenes de estabilidad para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
34
5.12 Criterio de estabilidad de Nyquist
Criterio de estabilidad de Nyquist para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
33
5.11 Criterio de estabilidad de Bode
Criterio de estabilidad de Bode para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
32
5.10.3 Representación gráfica de los lugares de las raíces con Matlab
Comandos de Matlab para construir el lugar geométrico de las raíces (LGR) para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
31
5.10.2 Reglas para construir el lugar geométrico de las raíces
Reglas o pasos necesarios para construir el lugar geométrico de las raíces (LGR) para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
30
5.10.1 Condiciones de ángulo y magnitud
Condiciones de ángulo y magnitud presentes al aplicar el criterio de estabilidad de Evans o del lugar geométrico de las raíces para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
29
5.10 Estabilidad por el lugar de raíces
Criterio de estabilidad de Evans o del lugar geométrico de las raíces para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
28
5.9.2 Aplicación del criterio de Routh
Forma o método de aplicación del criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
27
5.9.1 Casos especiales
casos especiales que se presentan al aplicar el criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
26
Procedimiento criterio de Routh
Pasos para implementar el criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
25
5.9 Criterio de estabilidad de Routh
Criterio de estabilidad de Routh-Herwitz para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
24
5.8 Estabilidad de sistemas de control en lazo cerrado
Criterio general de estabilidad para sistemas de control en lazo cerrado, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
23
Resumen error en estado estacionario
Resumen sobre las tres constante (Kp, Kv, Ka) de error en estado estacionario presentes en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
22
5.7.3 Constante de error de aceleración estática Ka
Calculo y descripción de la constante de error de aceleración estática ante una entrada parábola paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
21
5.7.2 Constante de error de velocidad estática Kv
Calculo y descripción de la constante de error de velocidad estática ante una entrada rampa paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
20
5.7.1 Constante de error de posición estática Kp
Calculo y descripción de la constante de error de posición estática ante una entrada escalón paras errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
19
5.7 Errores de estado estacionario
Calculo y descripción de los errores en estado estacionario presente en los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
18
5.5 Diagrama de bloques
Representación de sistemas de control de procesos mediante los diagramas de bloques, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
17
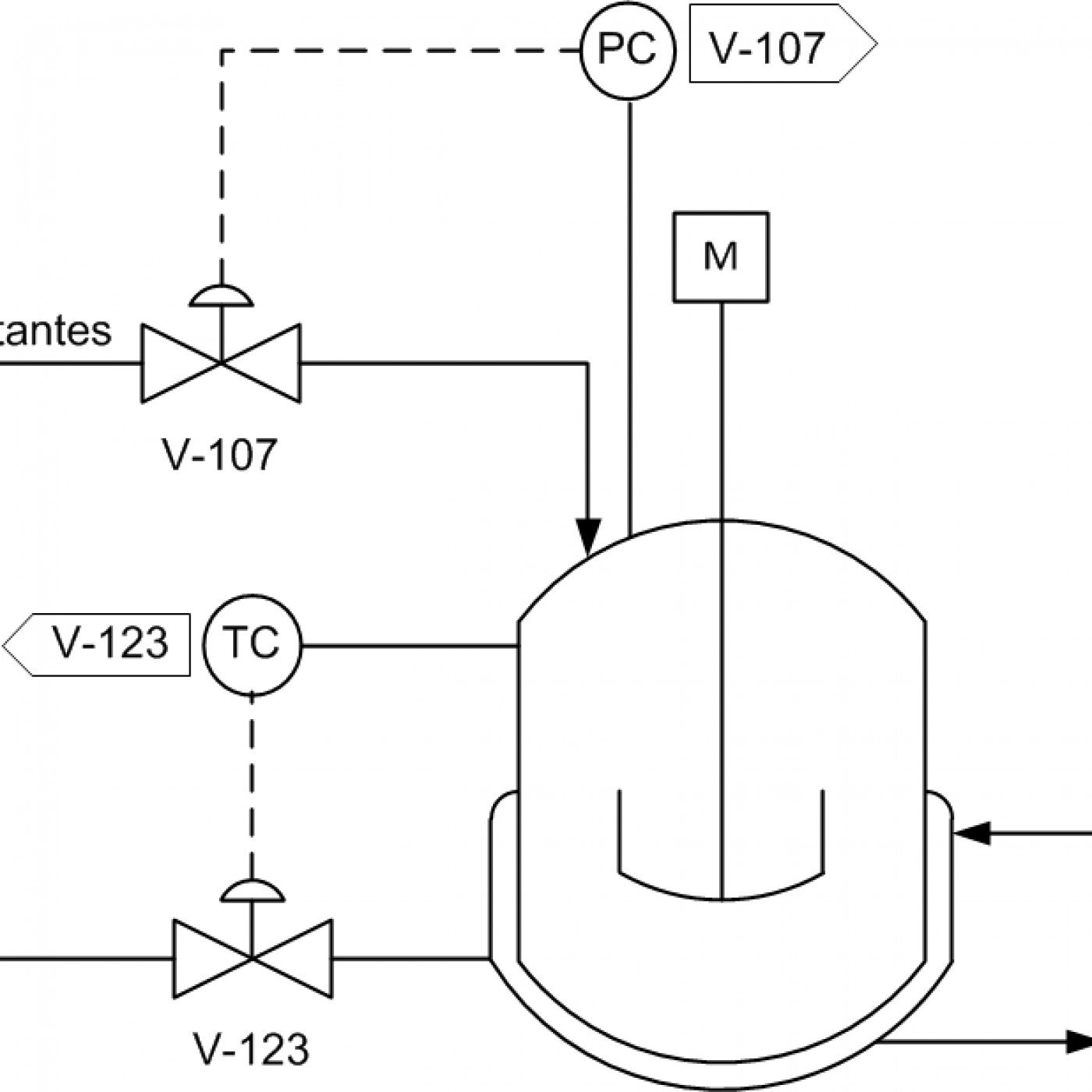
5.4.1 Elaboración de un P&ID
Representación de sistemas de control de procesos mediante P&ID ejemplo de elaboración de un diagrama de tuberías e instrumentación, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
16
f) Miscelánea de símbolos
Representación de sistemas de control de procesos mediante P&ID Miscelánea de símbolos, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
15
e) Símbolos de transmisores
Representación de sistemas de control de procesos mediante P&ID símbolos de transmisores, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
14
d) Identificación con letras
Representación de sistemas de control de procesos mediante P&ID identificación con letras, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
13
c) Instrumentación general o símbolos de funciones
Representación de sistemas de control de procesos mediante P&ID símbolos de instrumentos o funciones, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
12
b) Símbolos de válvulas
Representación de sistemas de control de procesos mediante P&ID símbolos de válvulas, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
11
a) Símbolos de líneas
Representación de sistemas de control de procesos mediante P&ID símbolos de tuberías, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
10
5.4 Diagramas de instrumentación P&ID
Representación de sistemas de control de procesos mediante los diagramas de tuberías e intrumentación, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
9
5.1.2 Función de transferencia en lazo cerrado
Descripción de las funciones de transferencia en lazo cerrado para sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
8
5.1.1 Función de transferencia en lazo abierto y de trayectoria directa
Descripción de las funciones de transferencia en lazo abierto y en la trayectoria directa para sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
7
5.1 Tipos de sistemas de control
Definición de las clases o tipos de sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
6
5.3 Configuración del controlador
Distintas configuraciones que pueden presentarse o seleccionarse cuando se diseñan sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
5
5.2 Especificaciones de diseño
Especificaciones a tener en cuenta para iniciar con el diseño de sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
4
5.6 Metodología de diseño para un control de procesos
Metodología propuesta para iniciar con el diseño de sistemas de control para procesos industriales, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
3
Terminología de los sistemas de control
Principales términos utilizados en el análisis y diseño de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
2
Objetivos de los sistemas de control
Objetivos principales de los sistemas de control, perteneciente a la Unidad 5: Introducción a los Sistemas de Control, para el curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
-
1
5. Introducción a los sistemas de control
Introducción para la Unidad 5: Introducción a los sistemas de control, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
We're indexing this podcast's transcripts for the first time — this can take a minute or two. We'll show results as soon as they're ready.
No matches for "" in this podcast's transcripts.
No topics indexed yet for this podcast.
Loading reviews...
ABOUT THIS SHOW
Quinta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
HOSTED BY
Sistemas Dinámicos y Control
CATEGORIES
Loading similar podcasts...
Frequently Asked Questions
How many episodes does Unidad 5: Introducción a los sistemas de control have?
Unidad 5: Introducción a los sistemas de control currently has 39 episodes available on PodParley. New episodes are automatically indexed when they're published to the podcast feed.
What is Unidad 5: Introducción a los sistemas de control about?
Quinta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
How often does Unidad 5: Introducción a los sistemas de control release new episodes?
Unidad 5: Introducción a los sistemas de control has 39 episodes. Check the episode list to see recent publication dates and frequency.
Where can I listen to Unidad 5: Introducción a los sistemas de control?
You can listen to Unidad 5: Introducción a los sistemas de control on PodParley by clicking any episode. We provide an embedded audio player for direct listening, and you can also subscribe via your preferred podcast app using the RSS feed.
Who hosts Unidad 5: Introducción a los sistemas de control?
Unidad 5: Introducción a los sistemas de control is created and hosted by Sistemas Dinámicos y Control.
URL copied to clipboard!